
 ВњЦЗ:21
ВњЦЗ:21
 СЊЯЕЮвУЧ
СЊЯЕЮвУЧ

ДЫЭтЃЌДЈЦщжиЙЄжЦдьЕФдЖГЬаЕїВйзїЛњЦїШЫЯЕЭГ“Successor”ЃЌвВдкЛњЦїШЫСьгђжаЦ№ЕНСЫХззЉв§гёЕФзїгУЁЃ“Successor”ПЩвдЭЈЙ§ПижЦЦїЕЅдЊдЖГЬВйзїдЖДІЕФЛњЦїШЫЃЌЛњЦїШЫвдЭљБЛШЯЮЊФбвдЪЕЯж“ашвЊШЫРрИаОѕЕФзївЕ”ЃЌ“Successor”дкетЗНУцПЊБйСЫаТЕФПЩФмадЁЃЫќЛЙОпБИ“ММФмДЋГаЛњЦїШЫ”етвЛживЊВуУцЁЃВЛгУБрГЬМДПЩжБНгЯђ“Successor”ЪОНЬШЫРрЕФЯИЮЂЖЏзїЃЌжЛвЊЛњЦїШЫМЧзЁСЫНГШЫЕФММЪѕЃЌаТШЫОЭПЩвдЭЈЙ§ЛњЦїШЫШЅбЇЯАНГШЫЕФММЪѕЁЃжЇГжЖржиПижЦЃЌШУвЛУћВйзїдБЭЌЪБВйзїЖрЬЈЛњЦїШЫЃЌРћгУИпЫйЭЈаХЭјЃЌЮДРДвВаэПЩвдЪЕЯжДгвЛИіЕиЗНПижЦШЋЪРНчИїЕиЕФЙЄГЇЁЃУцЖдМДНЋЕНРДЕФжЧФмЙЄГЇЪБДњЃЌетЕФШЗЪЧвЛЬзМЋЮЊЪЕгУЕФЯЕЭГЁЃ

ФПЧАгІгУ***ЙуЗКЕФЪЧ“ДЙжБЖрЙиНкаЭЛњЦїШЫ”ЁЃгЩОпгаЖрИіЯёШЫРрЪжБлвЛбљЕФЙиНкЃЈ=жсЃЉЕФЛњаЕБл+а§зЊжсЙЙГЩЃЌЛюдОгкКИНгЁЂТыЖтЁЂзщзАЕШИїРргУЭОжаЁЃЖј“ЫЎЦНЖрЙиНкаЭЛњЦїШЫ”дђгЩЫЎЦНЗНЯђЕФа§зЊжсКЭДЙжБЗНЯђЕФжБЯпжсЙЙГЩЁЃгЩгкЩЯЯТдЫЖЏЕФЧАЖЫВПЗжЯђЫЎЦНЗНЯђвЦЖЏЃЌЪЪКЯдкИпЖШЮШЖЈЕФЙЄзїЬЈЩЯЕФзївЕЁЃЖјЩУГЄПьЫйзївЕЕФдђЪЧ“ВЂСЊаЭЛњЦїШЫ”ЁЃЭЈЙ§вдВЂСаЃЈВЂааЃЉЕФЗНЪНХфжУЕФЖрИіЙиНкПижЦЧАЖЫЃЌЪЕЯжИпЫйЧвОЋУмЕФЖЏзїЃЌгУгкзЅШЁДЋЫЭДјЩЯЕФСїЖЏЧсСПЙЄМўЕШЁЃ
ДЋЭГЕФЙЄвЕЛњЦїШЫашвЊгУАВШЋеЄРИЮЇЦ№РДЃЌЖјазїЛњЦїШЫЕФЬиЕуЪЧПЩвдгыШЫРрдкЭЌвЛПеМфФкВЂМчЙЄзїЁЃДЈЦщжиЙЄРћгУазїЛњЦїШЫ“duAro”ЃЌПЊЗЂГіСЫ“зЪдДРЌЛјЗжРрзївЕжЇдЎЯЕЭГ”ЁЃЦфАВзАПеМфНіЯрЕБгквЛЮЛШЫРрВйзїдБЃЌНкЪЁПеМфЧвОпгаСНИіЛњаЕБлЃЌПЩвдгыШЫРрВйзїдБдкЭЌвЛЬѕЯпЩЯНјааДЋЫЭДјЗжМ№зївЕЁЃ
СЫНтИќЖрЧызЩбЏЃКДЈЦщЛњЦїШЫХфМўЁЂkawasakiaЛњЦїШЫЮЌБЃ
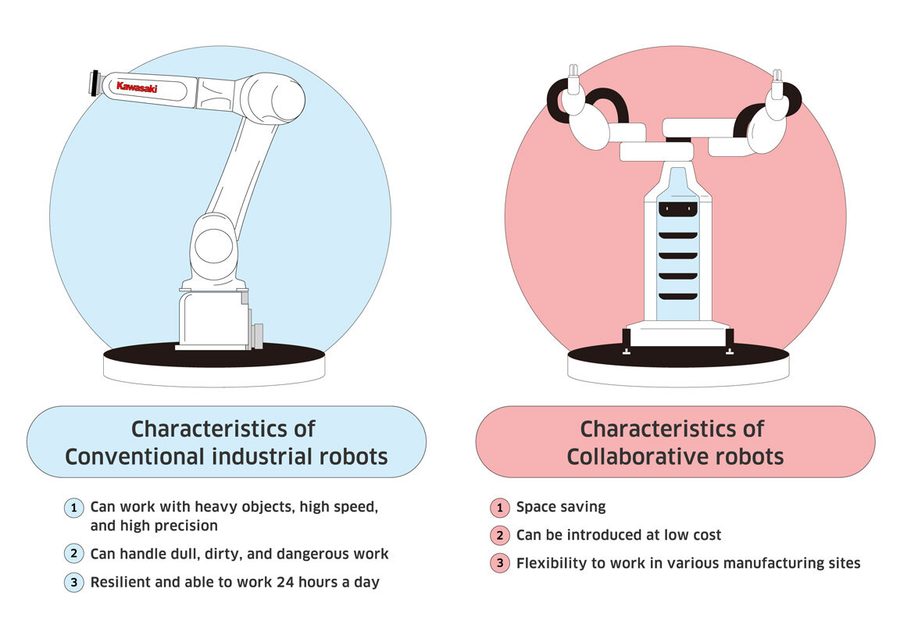
- ЯТвЛЦЊЃКДЈЦщЛњЦїШЫЕФЬиЕу
- ЩЯвЛЦЊЃКДЈЦщЛњЦїШЫASгябдБрГЬ